раздел механики (См.
Механика)
, в котором изучаются перемещения, деформации и напряжения, возникающие в покоящихся или движущихся упругих телах под действием нагрузки. У. т. - теоретическая основа расчётов на прочность, деформируемость и устойчивость в строительном деле, авиа- и ракетостроении, машиностроении, горном деле и др. областях техники и промышленности, а также в физике, сейсмологии, биомеханике и др. науках. Объектами исследования методами У. т, являются разнообразные тела (машины, сооружения, конструкции и их элементы, горные массивы, плотины, геологические структуры, части живого организма и т.п.), находящиеся под действием сил, температурных полей, радиоактивных облучений и др. воздействий. В результате расчётов методами У, т. определяются допустимые нагрузки, при которых в рассчитываемом объекте не возникают напряжения или перемещения, опасные с точки зрения прочности или недопустимые по условиям функционирования; наиболее целесообразные конфигурации и размеры сооружений, конструкций и их деталей; перегрузки, возникающие при динамическом воздействии, например при прохождении упругих волн (См.
Упругие волны)
, амплитуды и частоты колебаний конструкций или их частей и возникающие в них динамические напряжения; усилия, при которых рассчитываемый объект теряет устойчивость. Этими расчётами определяются также материалы, наиболее подходящие для изготовления проектируемого объекта, или материалы, которыми можно заменить части организма (костные и мышечные ткани, кровеносные сосуды и т. п,). Методы У. т. эффективно используются и для решения некоторых классов задач теории пластичности (в методе последовательных приближений).
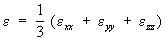
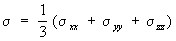
Физические законы
упругости (См.
Упругость) материалов, надёжно проверенные экспериментально и имеющие место для большинства материалов, по крайней мере при малых (а иногда и очень больших) деформациях, отражают взаимно однозначные зависимости между текущими (мгновенными) значениями напряжений σ и деформаций ε, в отличие от законов пластичности, в которых напряжения зависят от процесса изменения деформаций (при одних и тех же деформациях, достигнутых путём различных процессов, напряжения различны). При растяжении цилиндрического образца длины
l, радиуса
r, с площадью поперечного сечения
F имеет место пропорциональность между растягивающей силой
Р, продольным удлинением образца Δ
l и поперечным удлинением Δ
r, которая выражается равенствами:

,

, где σ
1 = P/F - нормальное напряжение в поперечном сечении,
 -
- относительное
удлинение образца,

- относительное изменение поперечного размера;
Е - модуль Юнга (модуль продольной
упругости), ν -
Пуассона коэффициент. При кручении тонкостенного трубчатого образца касательное напряжение τ в поперечном сечении вычисляется по значениям площади сечения, его радиуса и приложенного крутящего момента. Деформация сдвига γ, определяемая по наклону образующих, связана с τ равенством τ
= Gγ
, где
G - модуль сдвига.
При испытаниях образцов, вырезанных из изотропного материала по разным направлениям, получаются одни и те же значения
Е, G и ν. В среднем изотропны многие конструкционные металлы и сплавы, резина, пластмассы, стекло, керамика, бетон. Для анизотропного материала (древесина, кристаллы, армированные бетон и пластики, слоистые горные породы и др.) упругие свойства зависят от направления.
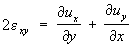
Напряжение в любой точке тела характеризуется шестью величинами - компонентами напряжений: нормальными напряжениями σ
хх, σ
уу, σ
zz и касательными напряжениями σ
ху, σ
уz, σ
zx, Причём σ
ху = σ
ух и т.д.
Деформация в любой точке тела также характеризуется шестью величинами - компонентами деформаций: относительными удлинениями ε
хх, ε
уу, ε
zz и сдвигами ε
ху, ε
уz, ε
zx, Причём ε
ху = ε
ух и т.д.
Основным физическим законом У. т. является обобщённый
Гука закон, согласно которому нормальные напряжения линейно зависят от деформаций. Для изотропных материалов эти зависимости имеют вид:
,

,

,
,

,

, (1)
где
- средняя (гидростатическая) деформация, λ и μ = G -
Ламе постоянные. Т. о., упругие свойства изотропного материала характеризуются двумя постоянными λ и μ или какими-нибудь выраженными через них двумя модулями
упругости (См.
Модули упругости)
. Равенство (1) можно также представить в виде
,..., (2)
, ...,

где
 -
- среднее (гидростатическое) напряжение,
К - модуль всестороннего сжатия.
Для анизотропного материала 6 зависимостей между компонентами напряжений и деформаций имеют вид:
(3)
...............................................................
Из входящих сюда 36 коэффициентов cij называются модулями упругости, 21 между собой независимы и характеризуют упругие свойства анизотропного материала.
Для нелинейного упругого изотропного материала в равенствах (2) всюду вместо μ входит коэффициент

, а соотношение

заменяется равенством

, где величина ε
u называется интенсивностью деформации, а функции
Ф и
f, универсальные для данного материала, определяются из опытов. Когда
Ф (ε
u) достигает некоторого критического значения, возникают пластические деформации. Законы пластичности при пропорциональном возрастании нагрузок или напряжений (простое нагружение) имеют тот же вид, но с др. значениями функций Ф и
f (законы теории малых упруго-пластических деформаций), а при уменьшении напряжений (разгрузке) имеют место соотношения (1) или (2), в которых вместо σ
ij и ε
ij подставляются их приращения (разности двух текущих значений).
Математическая задача У. т. при равновесии состоит в том, чтобы, зная действующие внешние силы (нагрузки) и т. н. граничные условия, определить значения в любой точке тела компоненты напряжений и деформаций, а также компоненты ux, uy, иz; вектора перемещения каждой частицы тела, т. е. определить эти 15 величин в виде функций от координат x, у, z точек тела. Исходными для решения этой задачи являются дифференциальные уравнения равновесия:
,
, (4)
где ρ - плотность материала,
XYZ - проекции на координатные оси действующей на каждую частицу тела массовой силы (См.
Массовая сила) (например, силы тяжести), отнесённые к массе этой частицы.
К трём уравнениям равновесия присоединяются 6 равенств (1) в случае изотропного тела и ещё 6 равенств вида:
, ...,
, ..., (5)
устанавливающих зависимости между компонентами деформаций и перемещений.
Когда на часть S1 граничной поверхности тела действуют заданные поверхностные силы (например, силы контактного взаимодействия), проекции которых, отнесённые к единице площади, равны Fx, Fy, Fz, а для части S2 этой поверхности заданы перемещения её точек φх, φу, φz, граничные условия имеют вид:
(на S1) (6)
,

,

(на
S2) (7)
где l1, l2, l3 - косинусы углов между нормалью к поверхности и координатными осями. Первые условия означают, что искомые напряжения должны удовлетворять на границе S1 трём равенствам (6), а вторые - что искомые перемещения должны удовлетворять на границе S2 равенствам (7); в частном случае может быть φx = φy = φz = 0 (часть поверхности S2 жестко закреплена). Например, в задаче о равновесии плотины массовая сила - сила тяжести, поверхность S2 подошвы плотины неподвижна, на остальной поверхности S1 действуют силы: напор воды, давление различных надстроек, транспортных средств и т.д.
В общем случае поставленная задача представляет собой пространственную задачу У. т., решение которой трудно осуществимо. Точные аналитические решения имеются лишь для некоторых частных задач: об изгибе и кручении бруса, о контактном взаимодействии двух тел, о концентрации напряжений, о действии силы на вершину конического тела и др. Т. к. уравнения У. т. являются линейными, то решение задачи о совместном действии двух систем сил получается путём суммирования решений для каждой из систем сил, действующих раздельно (принцип линейной суперпозиции). В частности, если для какого-нибудь тела найдено решение при действии сосредоточенной силы в какой-либо произвольной точке тела, то решение задачи при произвольном распределении нагрузок получается путём суммирования (интегрирования). Такие решения, называются
Грина функциями
, получены лишь для небольшого числа тел (неограниченное пространство, полупространство, ограниченное плоскостью, и некоторые др.). Предложен ряд аналитических методов решения пространственной задачи У. т.: вариационные методы (Ритца, Бубнова - Галёркина, Кастильяно и др.), метод упругих потенциалов, метод Бетти и др. Интенсивно разрабатываются численные методы (конечно-разностные, метод конечных элементов и др.). Разработка общих методов решений пространственной задачи У. т. - одна из наиболее актуальных проблем У. т.
При решении плоских задач У. т. (когда один из компонентов перемещения равен нулю, а два других зависят только от двух координат) широкое применение находят методы теории функций комплексного переменного. Для стержней, пластин и оболочек, часто используемых в технике, найдены приближённые решения многих практически важных задач на основе некоторых упрощающих предположений. Применительно к этим объектам специфический интерес представляют задачи об устойчивости равновесия (см.
Устойчивость упругих систем)
. В задаче термоупругости определяются напряжения и деформации, возникающие вследствие неоднородного распределения температуры. При математической постановке этой задачи в правую часть первых трёх уравнений (1) добавляется член

, где α - коэффициент линейного теплового расширения,
T (
x1, x2, x3)
- заданное поле температуры. Аналогичным образом строится
теория электромагнитоупругости и
упругости подвергаемых облучению тел.
Большой практических интерес представляют задачи У. т. для неоднородных тел. В этих задачах коэффициент λ, μ в уравнении (1) являются не константами, а функциями координат, определяющими поле упругих свойств тела, которое иногда задают статистически (в виде некоторых функций распределения). Применительно к этим задачам разрабатываются статистические методы У. т., отражающие статистическую природу свойств поликристаллических тел.
В динамических задачах У. т. искомые величины являются функциями координат и времени. Исходными для математического решения этих задач являются дифференциальные уравнения движения, отличающиеся от уравнений (4) тем, что правые части вместо нуля содержат инерционные члены

и т.д. К исходным уравнениям должны также присоединяться уравнения (1), (5) и, кроме граничных условий (6), (7), ещё задаваться начальные условия, определяющие, например, распределение перемещении и скоростей частиц тела в начальный момент времени. К этому типу относятся задачи о колебаниях конструкций и сооружений, в которых могут определяться формы колебаний и их возможные смены, амплитуды колебаний и их нарастание или убывание во времени, резонансные режимы, динамические напряжения, методы возбуждения и гашения колебаний и др., а также задачи о распространении упругих волн (сейсмические волны и их воздействие на конструкции и сооружения, волны, возникающие при взрывах и ударах, термоупругие волны и т.д.).
Одной из современных проблем У. т. является математическая постановка задач и разработка методов их решения при конечных (больших) упругих деформациях.
Экспериментальные методы У. т. (метод многоточечного тензометрирования,
Поляризационно-оптический метод исследования напряжений, метод муаров и др.) позволяют в некоторых случаях непосредственно определить распределение напряжений и деформаций в исследуемом объекте или на его поверхности. Эти методы используются также для контроля решений, полученных аналитическими и численными методами, особенно когда решения найдены при каких-нибудь упрощающих допущениях. Иногда эффективными оказываются экспериментально-теоретические методы, в которых частичная информация об искомых функциях получается из опытов.
Лит.: Ляв А., Математическая теория упругости, пер. с англ., М. - Л., 1935; Лейбензон Л. С., Курс теории упругости, 2 изд., М. - Л., 1947; Мусхелишвили Н. И., Некоторые основные задачи математической теории упругости, 5 изд., М., 1966; Трёхмерные задачи математической теории упругости, Тб., 1968; Лурье А. И., Теория упругости, М., 1970; Стретт Дж. В. (лорд Рэлей), Теория звука, пер. с англ., т. 1-2, М., 1955; Теория температурных напряжений, пер. с англ., М., 1964; Снеддон И. Н., Берри Д. С., Классическая теория упругости, пер. с англ., М., 1961; Тимошенко С. П., Гудьер Дж. Н., Теория упругости, пер. с англ., М., 1975.
А. А. Ильюшин, В. С. Ленский.



